Robot Workspace Reachability Analyzer for Early Feasibility Checks
Synopsis
Robot workspace reachability analysis is a high-leverage step for reducing deployment risk in manipulation projects. This page explains how engineers can validate task-region coverage, clearance, and approach constraints before building a full planning stack. Using URDFviewer, teams can run browser-based feasibility checks to compare robot models, test base placements, and detect unreachable regions quickly. The workflow is suited for concept studies, pre-sales engineering, and early system integration where speed and technical confidence are both required. Instead of relying on nominal reach specifications alone, this method evaluates realistic workspace performance under geometric constraints, helping teams avoid late design changes and improve overall robotic workcell planning quality.
The Core Question This Analyzer Answers
Before implementation, teams should answer:
- Can the robot access every required process location?
- Are required orientations feasible at those locations?
- Do obstacles invalidate otherwise reachable points?
- Which base placement yields best region coverage?
A workspace reachability analyzer provides evidence-backed answers to these questions.
Why Nominal Specs Are Not Enough
Datasheets provide useful bounds, but practical feasibility depends on:
- Full kinematic configuration limits.
- Tool geometry and mounted payload offsets.
- Cell obstacles and safety boundaries.
- Process-specific entry angle requirements.
Ignoring these constraints causes optimistic estimates that fail during deployment.
How to Run the Analysis
Use the following sequence in URDFviewer:
- Load the robot model and select base position candidates.
- Define obstacles and workcell boundaries.
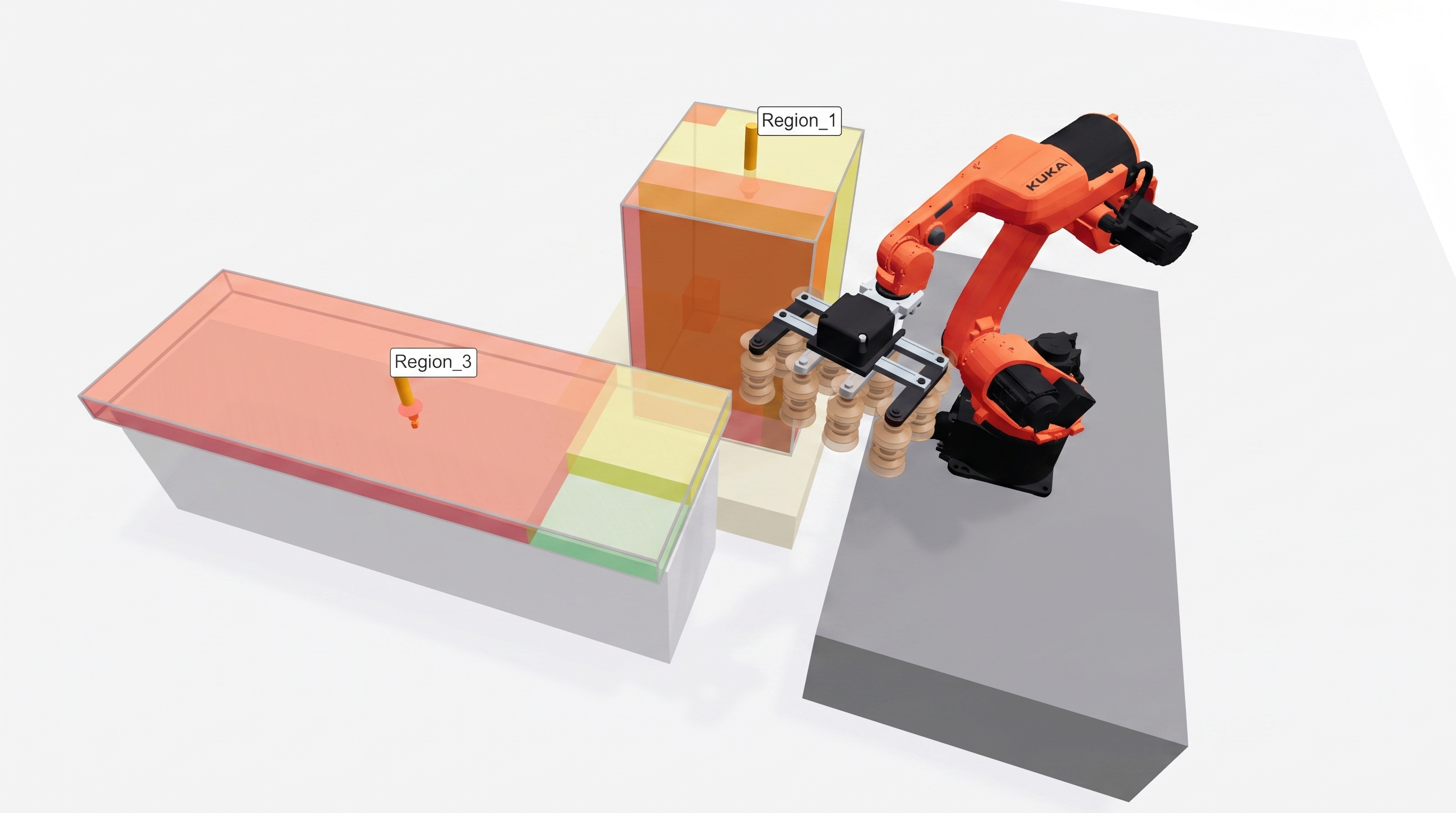
- Create task regions where the robot must operate.
- Apply orientation and approach constraints.
- Execute analysis and inspect pass or fail distribution.
Teams can use this output to choose robot model, base location, and target region design before procurement.
Recommended Decision Criteria
Adopt explicit criteria for approval:
- Minimum acceptable reachable-point ratio by process stage.
- Clearance threshold near guarded and fixed assets.
- Maximum allowable unreachable clusters in critical zones.
- Stability of coverage across expected product variants.
These criteria make feasibility reviews objective and repeatable.
Engineering Support for Reachability Planning
If your team is planning a new robotic cell and needs fast feasibility validation, contact Black Coffee Robotics. We support workspace analysis, robot selection, and system-level deployment planning.