Robot Cell Layout Validation Tool for Workcell Design
Synopsis
Robot cell layout validation should happen before controls implementation, not during commissioning. This page describes how to validate robot base position, obstacle placement, task-region geometry, and approach constraints using URDFviewer. The objective is to answer a specific engineering question early: can this workcell perform required motions safely and repeatably? Teams can run browser-based checks to compare multiple layout candidates, identify unreachable zones, and document collision risks without long setup cycles. The method supports integrators and manufacturing engineers who need rapid feasibility evidence during concept and proposal phases. By validating layouts before hardware lock-in, projects reduce rework, improve schedule predictability, and make better robot-selection decisions.
Why Layout Validation Is Often Delayed
Many teams begin with controller setup and detailed software pipelines, then discover avoidable physical constraints later. Typical late findings include:
- Narrow clearances near process fixtures.
- Reach loss at edge-of-cell targets.
- Infeasible approach vectors for process tools.
- Robot base placement that blocks maintenance access.
Early layout validation prevents these issues from propagating into software and commissioning plans.
Minimum Validation Scope
A robust validation pass should include:
- Candidate robot models and tool geometry.
- Fixed structures: fencing, tables, conveyors, and machines.
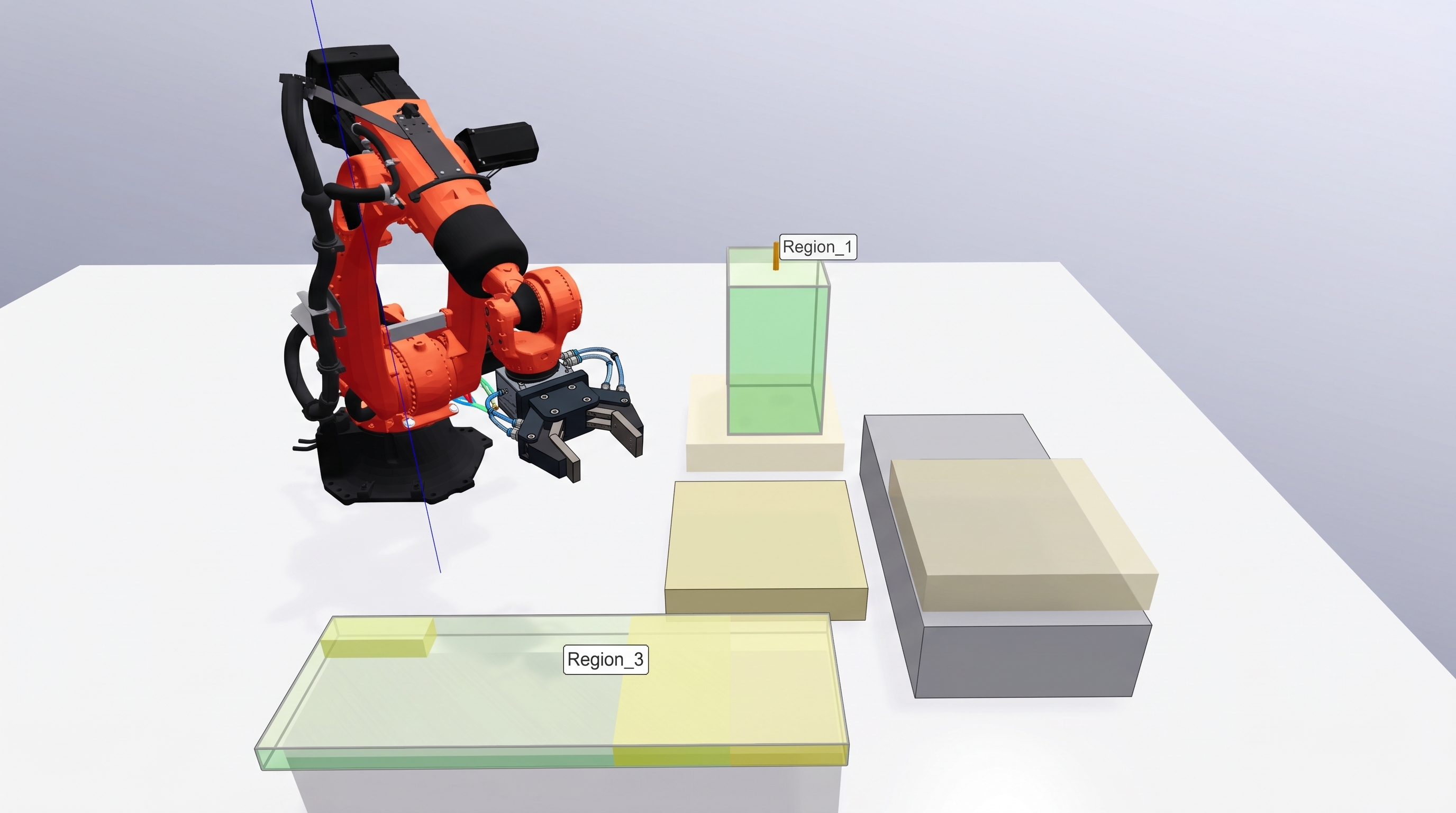
- Dynamic task zones for all operation stages.
- Approach and orientation constraints per task.
For integration teams working with ROS 2, this pre-work reduces downstream planning complexity.
Validation Sequence in URDFviewer
Run the following sequence:
- Import robot model and place base candidates.
- Build the cell scene with obstacles and boundaries.
- Define task regions and approach directions.
- Execute analysis and inspect failure clusters.
- Iterate cell geometry until target coverage is acceptable.
This sequence is designed for fast concept-to-decision loops in customer and internal design reviews.
Deliverables for Engineering Sign-Off
Prepare these items for sign-off:
- Layout option matrix with feasibility scores.
- Heatmap or region-level pass or fail summary.
- Collision and clearance exception list.
- Recommended final base position with rationale.
These artifacts improve cross-team alignment before mechanical fabrication and controls development.
Get Help with Workcell Validation
Need support validating a robotic cell design before deployment? Contact Black Coffee Robotics for feasibility analysis, layout optimization, and implementation planning.