Palletizing Robot Reachability Analysis for Faster Cell Planning
Synopsis
Palletizing projects fail late when teams validate reach and clearance after hardware procurement. This page explains a practical method for palletizing robot reachability analysis before commissioning. Using URDFviewer, engineering teams can test candidate robot arms, pallet positions, and approach constraints in a browser-based environment without setting up a full ROS 2 and MoveIt 2 stack. The process focuses on task-region coverage, collision checks, and base-placement decisions for industrial palletizing cells. If you are selecting between multiple robot models, this workflow helps you identify infeasible layouts early, reduce integration rework, and shorten timeline risk during cell design reviews.
What This Reachability Analysis Solves
Palletizing cells typically fail for one of four reasons:
- The robot can reach nominal pick and place points but cannot maintain required approach angles.
- Stack growth over time pushes end positions outside safe wrist orientations.
- Base placement optimized for one pallet pattern degrades coverage for another pattern.
- Protective structures and conveyors create collisions in transitions between picks and drops.
A palletizing robot reachability analysis should validate all four constraints before detailed controls work.
Practical Workflow in URDFviewer
Use URDFviewer to run fast feasibility checks:
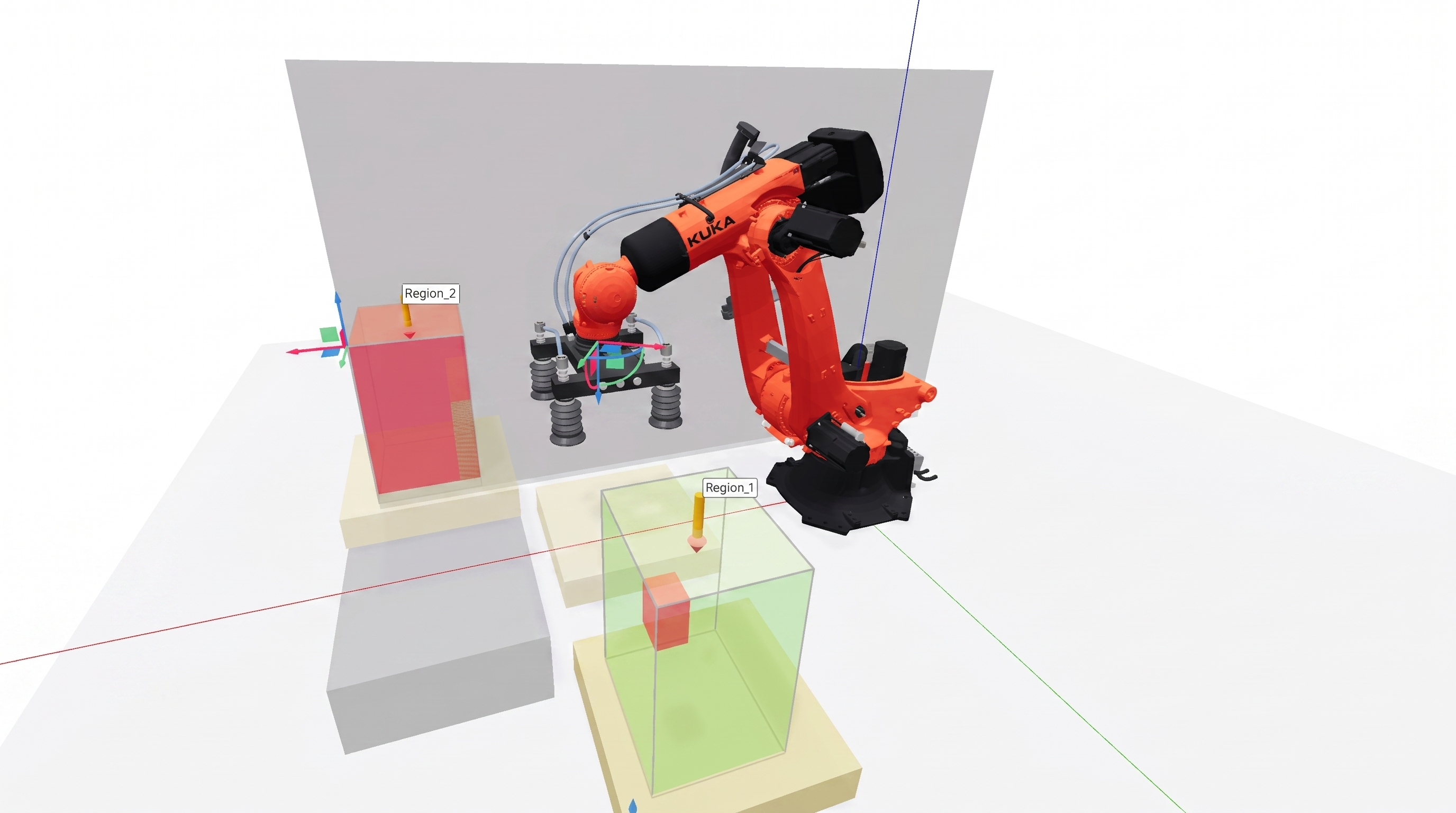
- Load the robot model and define end-of-line geometry.
- Insert pallet volumes, conveyor bounds, and fixed obstacles.
- Define target task regions for pick and place cycles.
- Apply approach-angle constraints for suction or gripper entry.
- Run workspace analysis to visualize successful and failed zones.
This workflow supports early-stage design decisions when commercial simulation setup is not yet justified.
Evaluation Outputs to Document
For each design candidate, capture these outputs:
- Reachable target ratio for all pallet positions.
- Failure distribution by location, orientation, and collision source.
- Recommended robot base offsets in X, Y, and Z.
- Clearance margins near guarding and conveyor boundaries.
These outputs create objective evidence for choosing robot model and cell geometry.
When to Escalate Beyond Feasibility
After reachability is stable, move to a full simulation and controls workflow for cycle-time optimization, trajectory tuning, and PLC integration. Early reachability screening does not replace commissioning, but it removes avoidable layout errors before expensive implementation work.
Request a Palletizing Feasibility Review
If you need a second-pass engineering review for a palletizing robot arm layout, contact Black Coffee Robotics. We support robot selection, workcell geometry optimization, and ROS 2 integration for production deployments.